
Perception
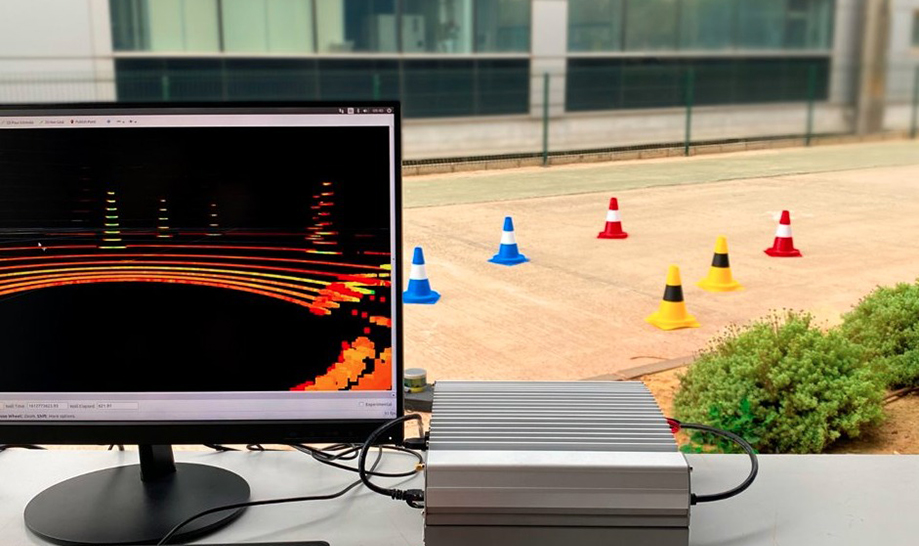
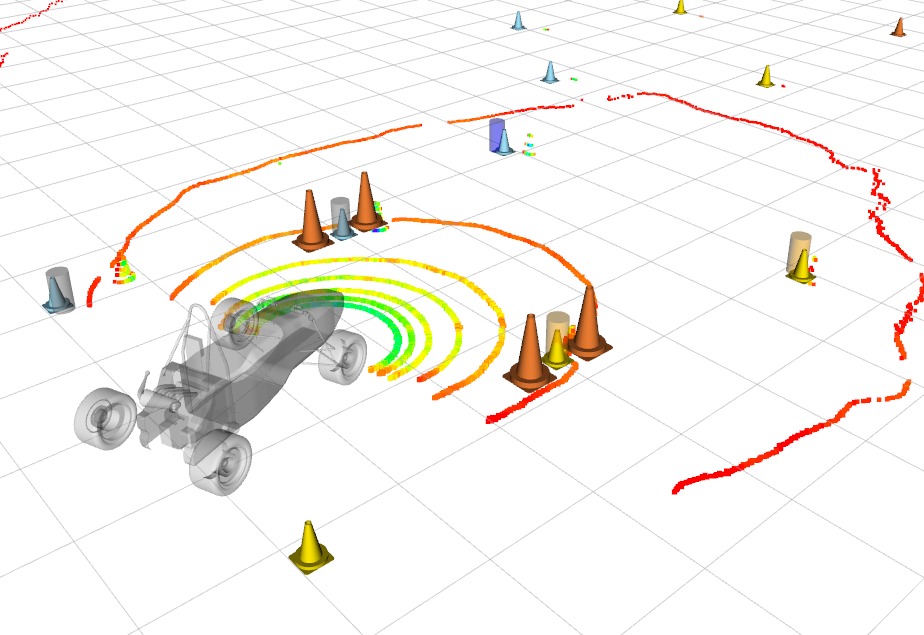
A través de un setup de cámaras estéreo y un sensor LIDAR se identifican los conos de la pista obteniendo así su posición y color.
La industria automovilística exige cada vez más la automatización hoy en día. Es por eso que, hace un año, en el FSUPV Team decidimos empezar el desafío de reemplazar la precisión de un piloto experimentado por un sistema completamente autónomo. Este sistema consta de las siguientes partes:
A través de un setup de cámaras estéreo y un sensor LIDAR se identifican los conos de la pista obteniendo así su posición y color.
Mediante los sensores del vehículo como el GPS, IMU y Sensores de Velocidad de Rueda, se obtienen los datos necesarios para saber el estado el que se encuentra el vehículo. El mapa se construye continuamente a partir de los datos de percepción y estimación de estado.

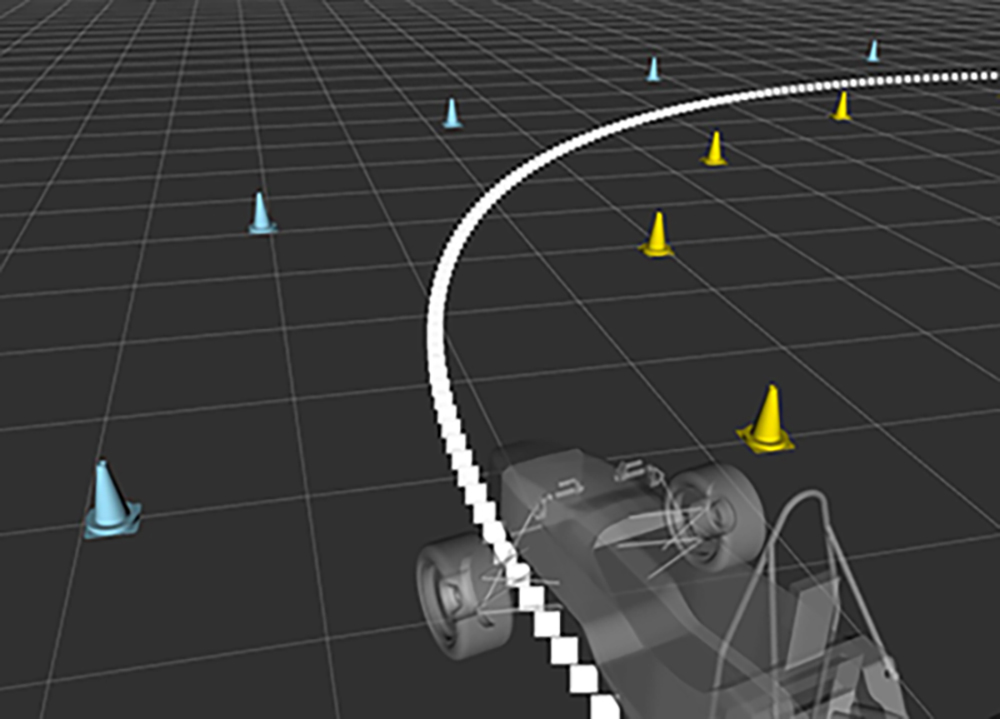
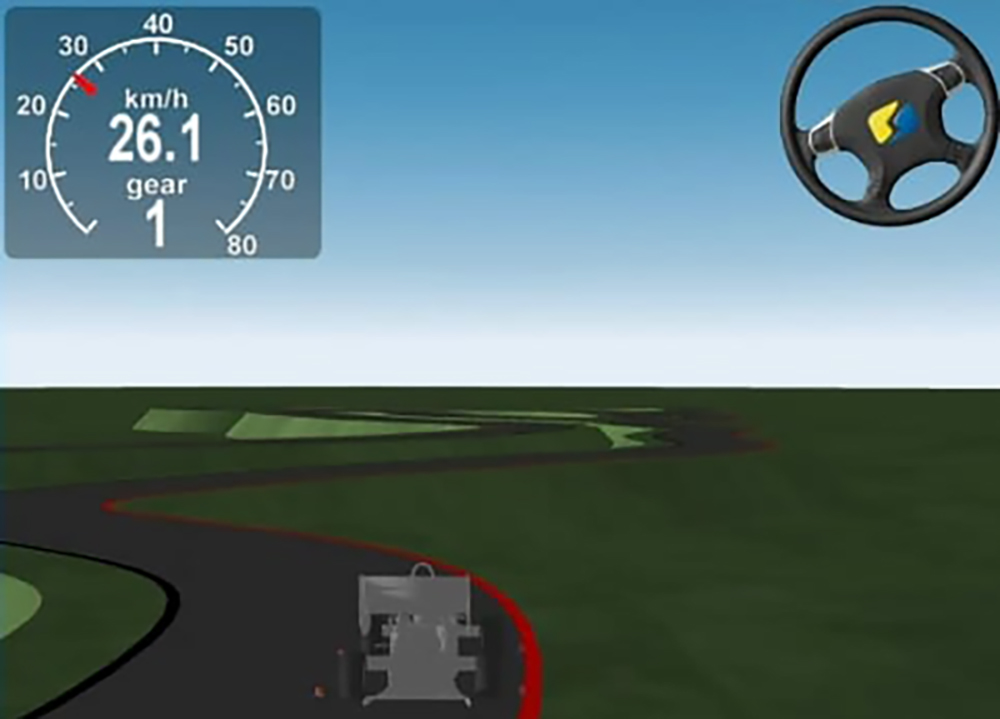
Una vez establecida la posición y color de los conos, se define la trayectoria a seguir por el coche y se realiza el control de los actuadores de la dirección, el acelerador y el frenado para alcanzar el rendimiento óptimo del prototipo.
Unificación de todos los componentes que forman el sistema autónomo. Se controla la comunicación, el protocolo de arranque y los sistemas de emergencia.

