FSUPV-08 DV
Primer prototipo autónomo

Siguiendo las tendencias del mundo del automovilismo, las principales competiciones europeas introdujeron una nueva categoría para coches totalmente autónomos. Es por ello que el equipo decidió desarrollar el FSUPV-08 DV, que cuenta con un sistema autónomo completo, diseñado, implementado y validado por un equipo formado por 12 estudiantes de diversos grados universitarios.

Tras dar los primeros pasos en este nuevo mundo tan desconocido para el equipo, a base de ambición, trabajo, esfuerzo y dedicación, se consiguió desarrollar un concepto innovador con el que buscamos tener una base robusta y fiable. Ésta, fue mejorando hasta conseguir un prototipo competitivo. Después de una primera etapa de adquisición de conocimientos y desarrollo del concepto inicial, se introdujo un periodo de recogida de data de sensores que permitió realizar un análisis completo de todo el software desarrollado. Esto nos permitió validar los diferentes módulos del sistema, así como la correcta comunicación y coordinación entre ellos.
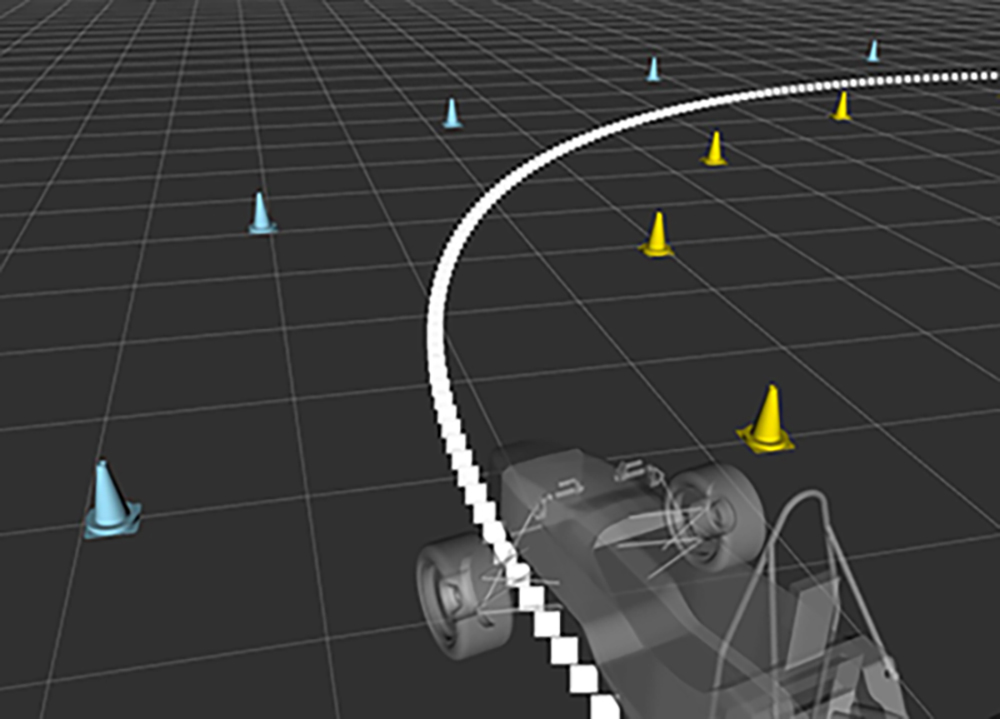
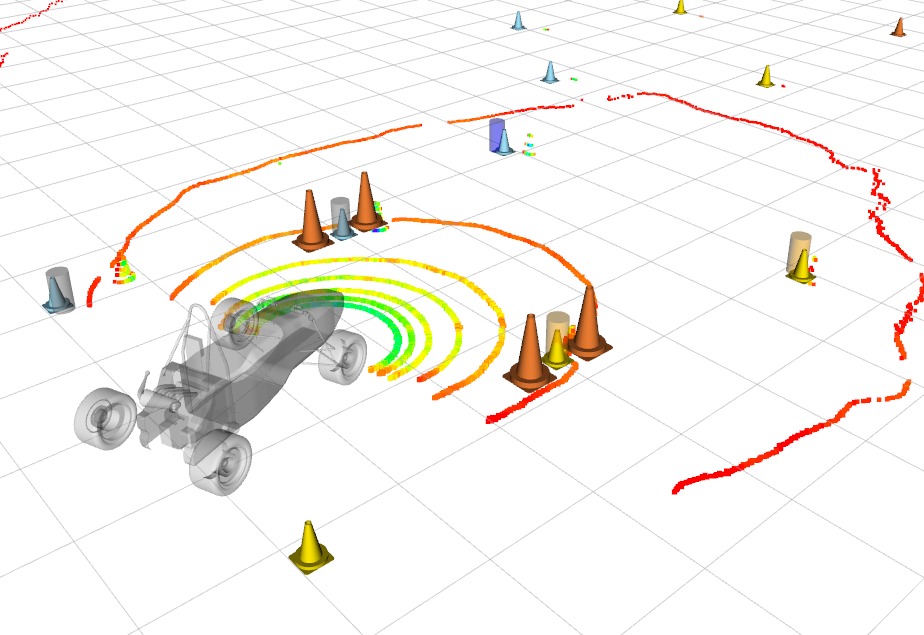
Contamos con algoritmos de percepción basados en cámara y LiDAR, con los cuales podemos obtener la posición y color de los conos que delimitan la pista. Además de ello, conociendo la posición del coche mediante sensores inerciales, logramos una fusión con las medidas de percepción y, por tanto, un mapeo y una localización completos. Una vez localizados, conseguimos generar una trayectoria y una velocidad objetivo para que nuestros sistemas de control actúen acordes a ello. Finalmente, se realizó la integración completa del sistema autónomo con el prototipo de combustión y comenzó la etapa de pruebas, en la que se fueron perfeccionando y mejorando los algoritmos hasta llegar a tener un prototipo competitivo.